发布日期:2021-10-28 20:59 浏览次数: 212

点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
✽1: 以ISO9283为基准。
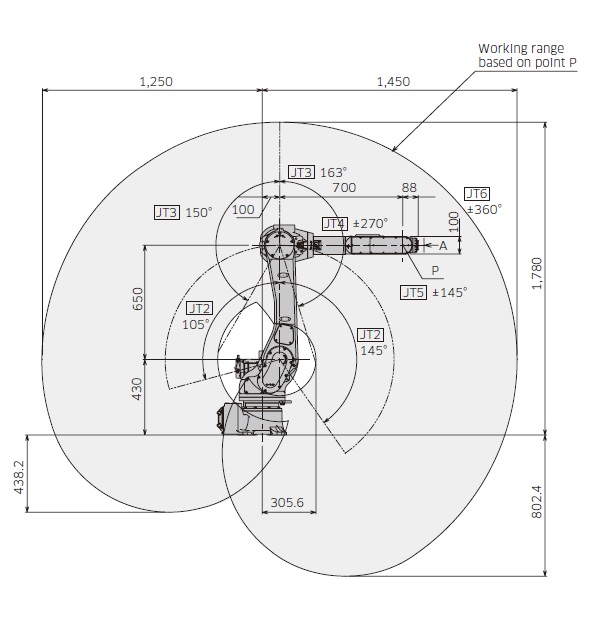
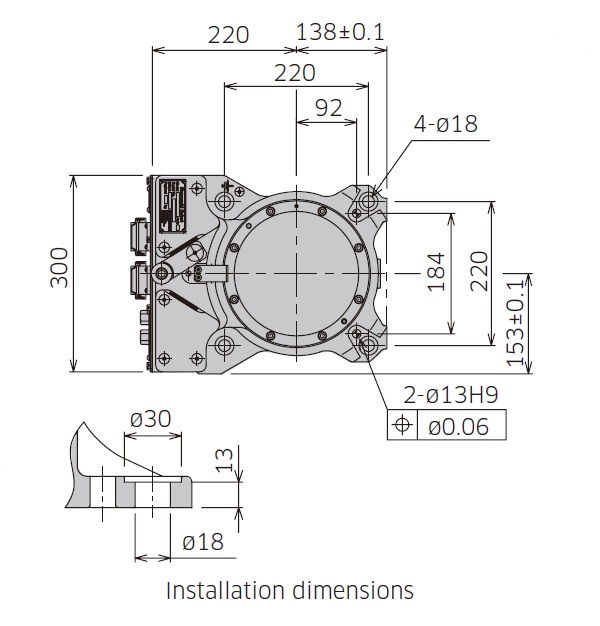
动作范围与尺寸
RA010N的规格
RA010N的规格
手臂类型
多关节型机器人
自由度
6
大负载能力 (kg)
10
大臂展 (mm)
1,450
重复定位精度 (mm) ✽1
±0.03
动作范围 (°)
手臂旋转 (JT1)
±180
手臂前后 (JT2)
+145 - −105
手臂上下 (JT3)
+150 - −163
手腕旋转 (JT4)
±270
手腕弯曲 (JT5)
±145
手腕扭转 (JT6)
±360
大速度 (°/s)
手臂旋转 (JT1)
250
手臂前后 (JT2)
250
手臂上下 (JT3)
215
手腕旋转 (JT4)
365
手腕弯曲 (JT5)
380
手腕扭转 (JT6)
700
允许负载扭矩 (N•m)
手腕旋转 (JT4)
22
手腕弯曲 (JT5)
22
手腕扭转 (JT6)
10
允许负载惯量 (kg•m2)
手腕旋转 (JT4)
0.7
手腕弯曲 (JT5)
0.7
手腕扭转 (JT6)
0.2
重量 (kg)
150
安装方式
地面, 悬挂
安装条件
环境温度 (°C)
0 - 45
相对湿度 (%)
35 - 85 (无结露)
保护等级
IP65
控制柜 / 所需电源 (kVA)
型号 面向北美
E01 / 5.6
型号 面向欧洲
型号 面向日本 & 亚洲